Robot Specifications & Design
Dual-robot autonomous system with specialized mechanisms and coordinated strategy:
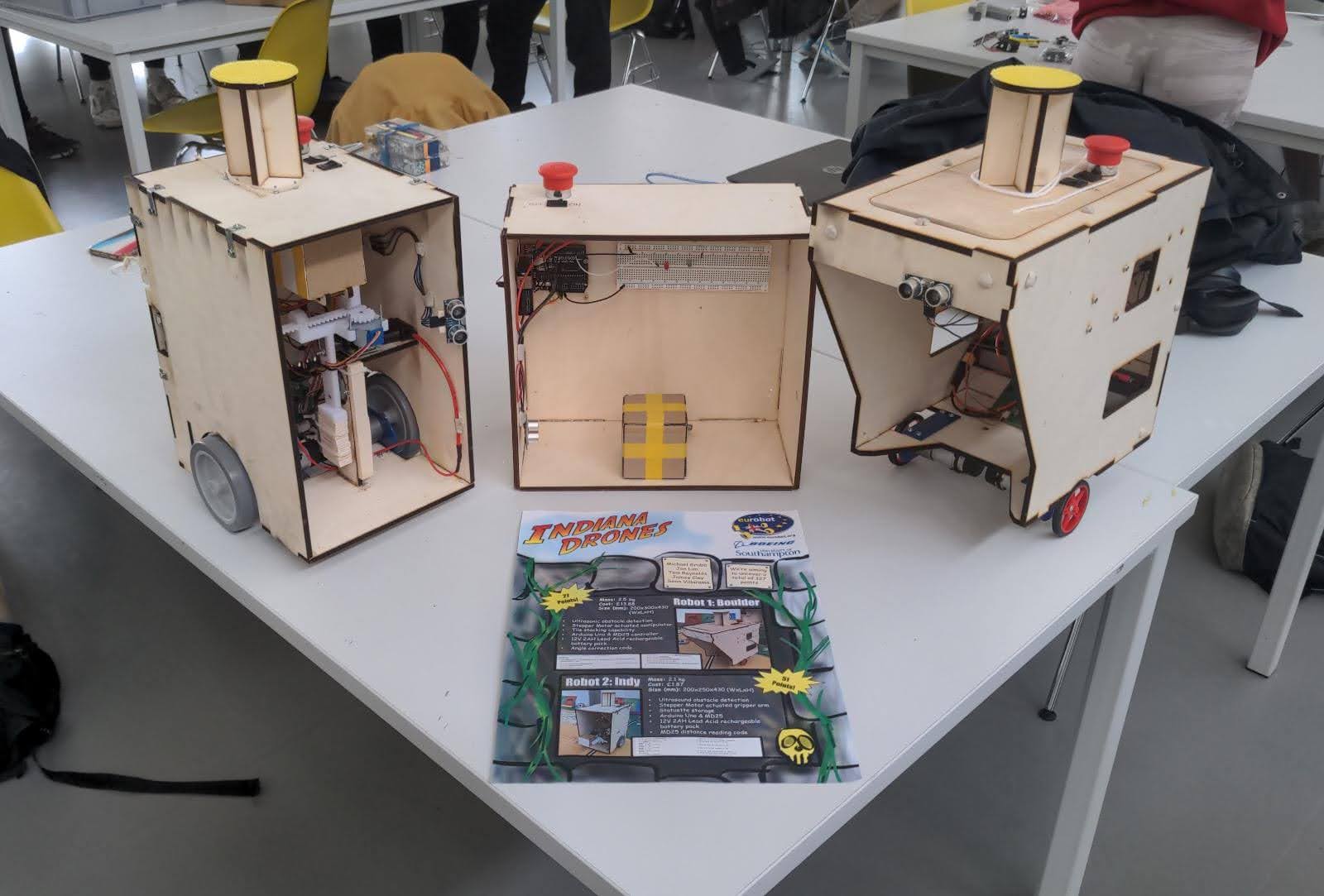
Robot 1 - "Indiana"
- • Primary Function: Statuette and replica manipulation with 90° rotating arm
- • Actuator: Rack and pinion grabber driven by dual 28BYJ-48 stepper motors
- • Storage System: Internal shelf mechanism for replica storage and deployment
- • Strategy: Precise slow movement for pedestal alignment and display cabinet operations
- • Scoring: 49 points through statuette display and excavation square activation
Robot 2 - "Boulder"
- • Primary Function: High-speed tile manipulation across competition surface
- • Dual Systems: Bottom-mounted rack & pinion scooper + servo-actuated screw grabber
- • Capacity: Pick up 2 tiles simultaneously, push 3 tiles at once
- • Wheels: Smaller diameter with enhanced tyres for precise movement
- • Scoring: 24 points through tile collection, gallery placement, and campsite delivery
Control Systems
- • Processor: Arduino UNO Rev3 boards for autonomous control logic
- • Motor Control: MD25 motor driver with EMG30 gear motors and encoders
- • Navigation: Encoder-based position tracking for accurate waypoint navigation
- • Sensors: HC-SR04 ultrasonic sensors (front and rear) for obstacle detection
- • Power: YUASA NP2-12 12V 2Ah battery for motors and electronics
Manufacturing & Materials
- • Structural Material: Laser-cut plywood for chassis and mounting plates
- • 3D Printing: Custom brackets and specialized components via FDM
- • Servos: MG996R servomotors for high-torque screw-driven grabber
- • Display Cabinet: Separate Arduino system with ultrasonic sensor and LED indicators
- • Budget: £447 total project cost including all components and materials
Core Technologies
Arduino
Autonomous control & sensors
SOLIDWORKS
Mechanical CAD design
C/C++
Arduino programming
3D Printing
FDM rapid prototyping